Systematic self-exploration of behaviors for robots in a dynamical systems framework
2018
Conference Paper
al
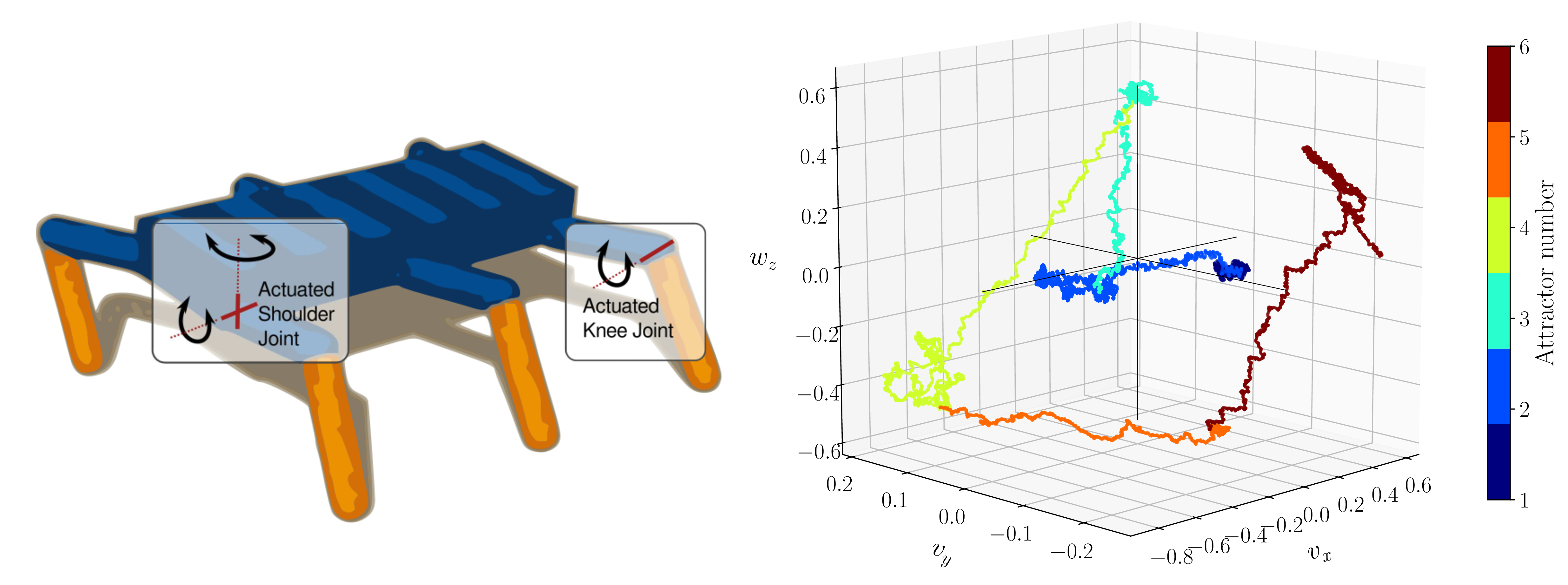
One of the challenges of this century is to understand the neural mechanisms behind cognitive control and learning. Recent investigations propose biologically plausible synaptic mechanisms for self-organizing controllers, in the spirit of Hebbian learning. In particular, differential extrinsic plasticity (DEP) [Der and Martius, PNAS 2015], has proven to enable embodied agents to self-organize their individual sensorimotor development, and generate highly coordinated behaviors during their interaction with the environment. These behaviors are attractors of a dynamical system. In this paper, we use the DEP rule to generate attractors and we combine it with a “repelling potential” which allows the system to actively explore all its attractor behaviors in a systematic way. With a view to a self-determined exploration of goal-free behaviors, our framework enables switching between different motion patterns in an autonomous and sequential fashion. Our algorithm is able to recover all the attractor behaviors in a toy system and it is also effective in two simulated environments. A spherical robot discovers all its major rolling modes and a hexapod robot learns to locomote in 50 different ways in 30min.
| Author(s): | Cristina Pinneri and Georg Martius |
| Book Title: | Proc. Artificial Life XI |
| Pages: | 319-326 |
| Year: | 2018 |
| Publisher: | MIT Press, Cambridge, MA |
| Department(s): | Autonomous Learning |
| Research Project(s): |
Self-exploration of Behavior
|
| Bibtex Type: | Conference Paper (inproceedings) |
| DOI: | 10.1162/isal_a_00062 |
| URL: | https://www.mitpressjournals.org/doi/abs/10.1162/isal_a_00062 |
|
BibTex @inproceedings{PinneriMartius2018:Repeller,
title = {Systematic self-exploration of behaviors for robots in a dynamical systems framework},
author = {Pinneri, Cristina and Martius, Georg},
booktitle = {Proc.\ Artificial Life XI},
pages = {319-326},
publisher = {MIT Press, Cambridge, MA},
year = {2018},
doi = {10.1162/isal_a_00062},
url = {https://www.mitpressjournals.org/doi/abs/10.1162/isal_a_00062}
}
|
|