Minsight: A Fingertip-Sized Vision-Based Tactile Sensor for Robotic Manipulation
2023
Article
al
hi
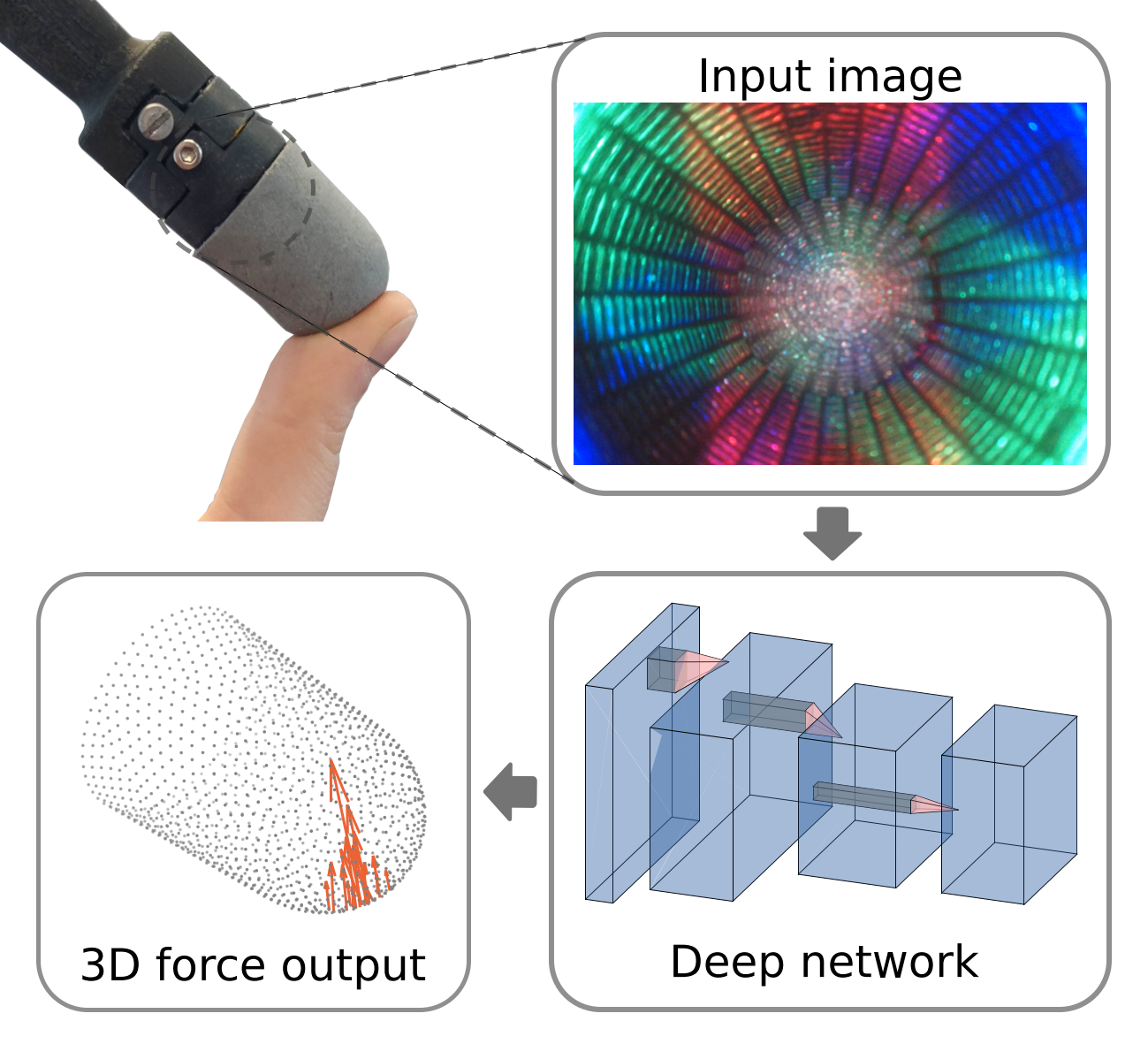
Intelligent interaction with the physical world requires perceptual abilities beyond vision and hearing; vibrant tactile sensing is essential for autonomous robots to dexterously manipulate unfamiliar objects or safely contact humans. Therefore, robotic manipulators need high-resolution touch sensors that are compact, robust, inexpensive, and efficient. The soft vision-based haptic sensor presented herein is a miniaturized and optimized version of the previously published sensor Insight. Minsight has the size and shape of a human fingertip and uses machine learning methods to output high-resolution maps of 3D contact force vectors at 60 Hz. Experiments confirm its excellent sensing performance, with a mean absolute force error of 0.07 N and contact location error of 0.6 mm across its surface area. Minsight's utility is shown in two robotic tasks on a 3-DoF manipulator. First, closed-loop force control enables the robot to track the movements of a human finger based only on tactile data. Second, the informative value of the sensor output is shown by detecting whether a hard lump is embedded within a soft elastomer with an accuracy of 98%. These findings indicate that Minsight can give robots the detailed fingertip touch sensing needed for dexterous manipulation and physical human–robot interaction.
| Author(s): | Iris Andrussow and Huanbo Sun and Katherine J. Kuchenbecker and Georg Martius |
| Journal: | Advanced Intelligent Systems |
| Volume: | 5 |
| Number (issue): | 8 |
| Year: | 2023 |
| Month: | August |
| Department(s): | Autonomous Learning, Haptic Intelligence |
| Research Project(s): |
Insight: a Haptic Sensor Powered by Vision and Machine Learning
|
| Bibtex Type: | Article (article) |
| Paper Type: | Journal |
| Article Number: | 2300042 |
| DOI: | 10.1002/aisy.202300042 |
| Note: | Inside back cover |
| State: | Published |
|
BibTex @article{Andrussow23-AIS-Minsight,
title = {Minsight: A Fingertip-Sized Vision-Based Tactile Sensor for Robotic Manipulation},
author = {Andrussow, Iris and Sun, Huanbo and Kuchenbecker, Katherine J. and Martius, Georg},
journal = {Advanced Intelligent Systems},
volume = {5},
number = {8},
month = aug,
year = {2023},
note = {Inside back cover},
doi = {10.1002/aisy.202300042},
month_numeric = {8}
}
|
|