
2024
Andrussow, I., Sun, H., Martius, G., Kuchenbecker, K. J.
Demonstration: Minsight - A Soft Vision-Based Tactile Sensor for Robotic Fingertips
Hands-on demonstration presented at the Conference on Robot Learning (CoRL), Munich, Germany, November 2024 (misc) Accepted
Urpi, N. A., Bagatella, M., Vlastelica, M., Martius, G.
Causal Action Influence Aware Counterfactual Data Augmentation
In Proceedings of the 41st International Conference on Machine Learning (ICML), 235, pages: 1709-1729, Proceedings of Machine Learning Research, (Editors: Salakhutdinov, Ruslan and Kolter, Zico and Heller, Katherine and Weller, Adrian and Oliver, Nuria and Scarlett, Jonathan and Berkenkamp, Felix), PMLR, July 2024 (inproceedings)
Geist, A. R., Frey, J., Zhobro, M., Levina, A., Martius, G.
Learning with 3D rotations, a hitchhiker’s guide to SO(3)
In Proceedings of the 41st International Conference on Machine Learning (ICML), 235, pages: 15331-15350, Proceedings of Machine Learning Research, (Editors: Salakhutdinov, Ruslan and Kolter, Zico and Heller, Katherine and Weller, Adrian and Oliver, Nuria and Scarlett, Jonathan and Berkenkamp, Felix), PMLR, July 2024 (inproceedings)
Paulus, A., Martius, G., Musil, V.
LPGD: A General Framework for Backpropagation through Embedded Optimization Layers
In Proceedings of the 41st International Conference on Machine Learning (ICML), 235, pages: 39989-40014, Proceedings of Machine Learning Research, (Editors: Salakhutdinov, Ruslan and Kolter, Zico and Heller, Katherine and Weller, Adrian and Oliver, Nuria and Scarlett, Jonathan and Berkenkamp, Felix), PMLR, July 2024 (inproceedings)
Ruaud, A., Sancaktar, C., Bagatella, M., Ratzke, C., Martius, G.
Modelling Microbial Communities with Graph Neural Networks
In Proceedings of the 41st International Conference on Machine Learning (ICML), 235, pages: 42742-42765, Proceedings of Machine Learning Research, (Editors: Salakhutdinov, Ruslan and Kolter, Zico and Heller, Katherine and Weller, Adrian and Oliver, Nuria and Scarlett, Jonathan and Berkenkamp, Felix), PMLR, July 2024 (inproceedings)
Spieler, A., Rahaman, N., Martius, G., Schölkopf, B., Levina, A.
The Expressive Leaky Memory Neuron: an Efficient and Expressive Phenomenological Neuron Model Can Solve Long-Horizon Tasks
In The Twelfth International Conference on Learning Representations (ICLR), May 2024 (inproceedings)
Khajehabdollahi, S., Zeraati, R., Giannakakis, E., Schäfer, T. J., Martius, G., Levina, A.
Emergent mechanisms for long timescales depend on training curriculum and affect performance in memory tasks
In The Twelfth International Conference on Learning Representations, ICLR 2024, May 2024 (inproceedings)
Gumbsch, C., Sajid, N., Martius, G., Butz, M. V.
Learning Hierarchical World Models with Adaptive Temporal Abstractions from Discrete Latent Dynamics
In The Twelfth International Conference on Learning Representations, ICLR 2024, May 2024 (inproceedings)
Yao, D., Xu, D., Lachapelle, S., Magliacane, S., Taslakian, P., Martius, G., von Kügelgen, J., Locatello, F.
Multi-View Causal Representation Learning with Partial Observability
The Twelfth International Conference on Learning Representations (ICLR), May 2024 (conference)
Simon, A., Weimar, J., Martius, G., Oettel, M.
Machine learning of a density functional for anisotropic patchy particles
Journal of Chemical Theory and Computation, 2024 (article)
2023
Kolev, P., Martius, G., Muehlebach, M.
Online Learning under Adversarial Nonlinear Constraints
In Advances in Neural Information Processing Systems 36, December 2023 (inproceedings)
Sancaktar, C., Piater, J., Martius, G.
Regularity as Intrinsic Reward for Free Play
In Advances in Neural Information Processing Systems 37, December 2023 (inproceedings)
Zadaianchuk, A., Seitzer, M., Martius, G.
Object-Centric Learning for Real-World Videos by Predicting Temporal Feature Similarities
In Thirty-seventh Conference on Neural Information Processing Systems (NeurIPS 2023), Advances in Neural Information Processing Systems 36, December 2023 (inproceedings)
Bagatella, M., Martius, G.
Goal-conditioned Offline Planning from Curious Exploration
In Advances in Neural Information Processing Systems 36, December 2023 (inproceedings)
Wang, Q., McCarthy, R., Bulens, D. C., McGuinness, K., O’Connor, N. E., Sanchez, F. R., Gürtler, N., Widmaier, F., Redmond, S. J.
Improving Behavioural Cloning with Positive Unlabeled Learning
7th Annual Conference on Robot Learning (CoRL), November 2023 (conference) Accepted
Andrussow, I., Sun, H., Kuchenbecker, K. J., Martius, G.
Minsight: A Fingertip-Sized Vision-Based Tactile Sensor for Robotic Manipulation
Advanced Intelligent Systems, 5(8), August 2023, Inside back cover (article)
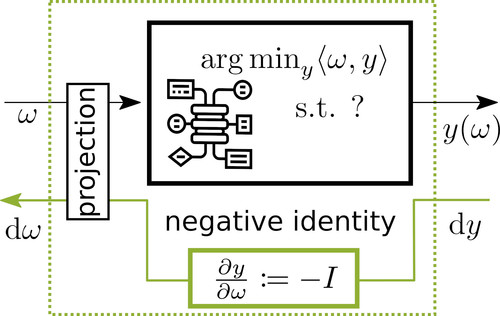
Sahoo, S., Paulus, A., Vlastelica, M., Musil, V., Kuleshov, V., Martius, G.
Backpropagation through Combinatorial Algorithms: Identity with Projection Works
In Proceedings of the Eleventh International Conference on Learning Representations, May 2023 (inproceedings) Accepted

Schumacher, P., Haeufle, D. F., Büchler, D., Schmitt, S., Martius, G.
DEP-RL: Embodied Exploration for Reinforcement Learning in Overactuated and Musculoskeletal Systems
In The Eleventh International Conference on Learning Representations (ICLR), May 2023 (inproceedings)
Gürtler, N., Blaes, S., Kolev, P., Widmaier, F., Wüthrich, M., Bauer, S., Schölkopf, B., Martius, G.
Benchmarking Offline Reinforcement Learning on Real-Robot Hardware
In Proceedings of the Eleventh International Conference on Learning Representations, The Eleventh International Conference on Learning Representations (ICLR), May 2023 (inproceedings)
Armengol Urpi, N., Bagatella, M., Hilliges, O., Martius, G., Coros, S.
Efficient Learning of High Level Plans from Play
In International Conference on Robotics and Automation, 2023 (inproceedings) Accepted
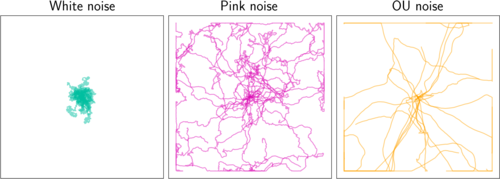
Eberhard, O., Hollenstein, J., Pinneri, C., Martius, G.
Pink Noise Is All You Need: Colored Noise Exploration in Deep Reinforcement Learning
In Proceedings of the Eleventh International Conference on Learning Representations (ICLR), The Eleventh International Conference on Learning Representations (ICLR), May 2023 (inproceedings)
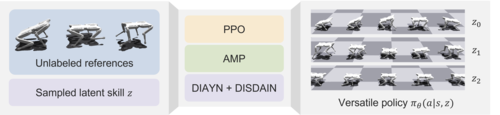
Li, C., Blaes, S., Kolev, P., Vlastelica, M., Frey, J., Martius, G.
Versatile Skill Control via Self-supervised Adversarial Imitation of Unlabeled Mixed Motions
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), IEEE International Conference on Robotics and Automation (ICRA), May 2023 (inproceedings) Accepted
Seitzer, M., Horn, M., Zadaianchuk, A., Zietlow, D., Xiao, T., Simon-Gabriel, C., He, T., Zhang, Z., Schölkopf, B., Brox, T., Locatello, F.
Bridging the Gap to Real-World Object-Centric Learning
In Proceedings of the Eleventh International Conference on Learning Representations, The Eleventh International Conference on Learning Representations (ICLR), May 2023 (inproceedings)

Lee, H., Sun, H., Park, H., Serhat, G., Javot, B., Martius, G., Kuchenbecker, K. J.
Predicting the Force Map of an ERT-Based Tactile Sensor Using Simulation and Deep Networks
IEEE Transactions on Automation Science and Engineering, 20(1):425-439, January 2023 (article)
Camps-Valls, G., Gerhardus, A., Ninad, U., Varando, G., Martius, G., Balaguer-Ballester, E., Vinuesa, R., Diaz, E., Zanna, L., Runge, J.
Discovering causal relations and equations from data
Physics Reports, 1044, pages: 1-68, 2023 (article)
Franca, F. D., Virgolin, M., Kommenda, M., Majumder, M., Cranmer, M., Espada, G., Ingelse, L., Fonseca, A., Landajuela, M., Petersen, B., Glatt, R., Mundhenk, N., Lee, C., Hochhalter, J., Randall, D., Kamienny, P., Zhang, H., Dick, G., Simon, A., Burlacu, B., Kasak, J., Machado, M., Wilstrup, C., Cava, W. L.
Interpretable Symbolic Regression for Data Science: Analysis of the 2022 Competition
arXiv, 2023 (article)
2022
Li, C., Vlastelica, M., Blaes, S., Frey, J., Grimminger, F., Martius, G.
Learning Agile Skills via Adversarial Imitation of Rough Partial Demonstrations
Proceedings of the 6th Conference on Robot Learning (CoRL), Conference on Robot Learning (CoRL), December 2022 (conference) Accepted
Wochner, I., Schumacher, P., Martius, G., Büchler, D., Schmitt, S., Haeufle, D.
Learning with Muscles: Benefits for Data-Efficiency and Robustness in Anthropomorphic Tasks
Proceedings of the 6th Conference on Robot Learning (CoRL), 205, pages: 1178-1188, Proceedings of Machine Learning Research, (Editors: Liu, Karen and Kulic, Dana and Ichnowski, Jeff), PMLR, December 2022 (conference)
Richardson, B. A., Kuchenbecker, K. J., Martius, G.
A Sequential Group VAE for Robot Learning of Haptic Representations
pages: 1-11, Workshop paper (8 pages) presented at the CoRL Workshop on Aligning Robot Representations with Humans, Auckland, New Zealand, December 2022 (misc)
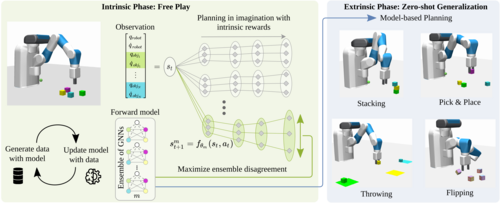
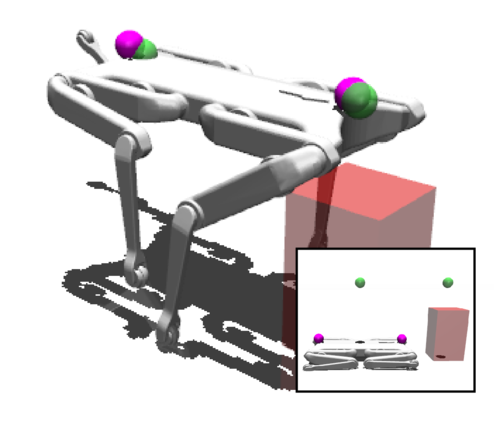
Sancaktar, C., Blaes, S., Martius, G.
Curious Exploration via Structured World Models Yields Zero-Shot Object Manipulation
In Advances in Neural Information Processing Systems 35 (NeurIPS 2022), pages: 24170-24183 , Curran Associates, Inc., 36th Annual Conference on Neural Information Processing Systems (NeurIPS 2022), December 2022 (inproceedings)
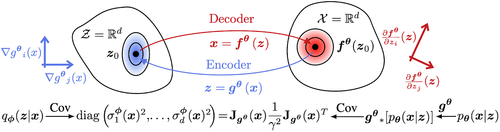
Reizinger*, P., Gresele*, L., Brady*, J., von Kügelgen, J., Zietlow, D., Schölkopf, B., Martius, G., Brendel, W., Besserve, M.
Embrace the Gap: VAEs Perform Independent Mechanism Analysis
Advances in Neural Information Processing Systems (NeurIPS 2022), 35, pages: 12040-12057, (Editors: S. Koyejo and S. Mohamed and A. Agarwal and D. Belgrave and K. Cho and A. Oh), Curran Associates, Inc., 36th Annual Conference on Neural Information Processing Systems, December 2022, *equal first authorship (conference)
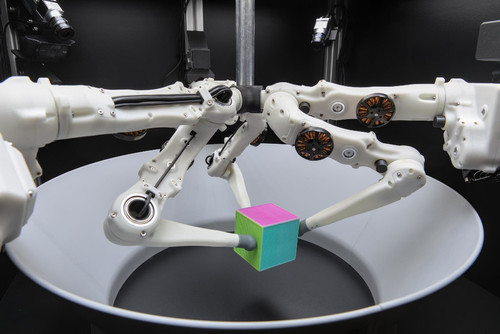
Gürtler, N., Widmaier, F., Sancaktar, C., Blaes, S., Kolev, P., Bauer, S., Wüthrich, M., Wulfmeier, M., Riedmiller, M., Allshire, A., Wang, Q., McCarthy, R., Kim, H., Baek, J., Kwon, W., Qian, S., Toshimitsu, Y., Michelis, M. Y., Kazemipour, A., Raayatsanati, A., Zheng, H., Cangan, B. G., Schölkopf, B., Martius, G.
Real Robot Challenge 2022: Learning Dexterous Manipulation from Offline Data in the Real World
Proceedings of the NeurIPS 2022 Competitions Track, 220, pages: 133-150, Proceedings of Machine Learning Research, (Editors: Ciccone, Marco and Stolovitzky, Gustavo and Albrecht, Jacob), PMLR, December 2022 (conference)
Vlastelica*, M., Blaes*, S., Pinneri, C., Martius, G.
Risk-Averse Zero-Order Trajectory Optimization
In Conference on Robot Learning, 164, PMLR, 5th Conference on Robot Learning (CoRL 2021) , 2022, *Equal Contribution (inproceedings)
Zadaianchuk, A., Martius, G., Yang, F.
Self-supervised Reinforcement Learning with Independently Controllable Subgoals
In Proceedings of the 5th Conference on Robot Learning (CoRL 2021) , 164, pages: 384-394, PMLR, 5th Conference on Robot Learning (CoRL 2021) , 2022 (inproceedings)

Andrussow, I., Sun, H., Kuchenbecker, K. J., Martius, G.
A Soft Vision-Based Tactile Sensor for Robotic Fingertip Manipulation
Workshop paper (1 page) presented at the IROS Workshop on Large-Scale Robotic Skin: Perception, Interaction and Control, Kyoto, Japan, October 2022 (misc)
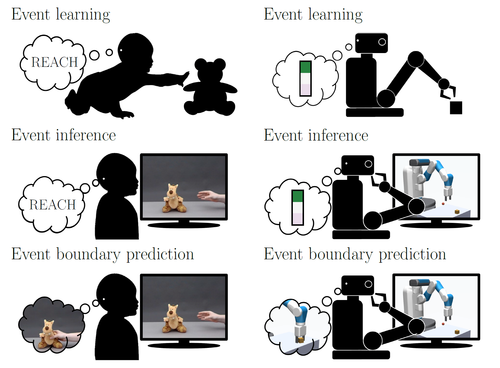
Gumbsch, C., Adam, M., Elsner, B., Martius, G., Butz, M. V.
Developing hierarchical anticipations via neural network-based event segmentation
In Proceedings of the IEEE International Conference on Development and Learning (ICDL 2022), pages: 1-8, 2022 IEEE International Conference on Development and Learning (ICDL), September 2022 (inproceedings)
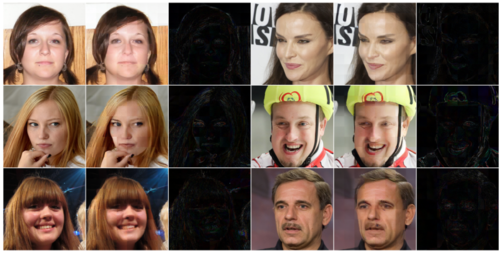
Ghosh, P., Zietlow, D., Black, M. J., Davis, L. S., Hu, X.
InvGAN: Invertible GANs
In Pattern Recognition, pages: 3-19, Lecture Notes in Computer Science, 13485, (Editors: Andres, Björn and Bernard, Florian and Cremers, Daniel and Frintrop, Simone and Goldlücke, Bastian and Ihrke, Ivo), Springer, Cham, 44th DAGM German Conference on Pattern Recognition (DAGM GCPR 2022), September 2022 (inproceedings)
Zietlow, D., Lohaus, M., Balakrishnan, G., Kleindessner, M., Locatello, F., Schölkopf, B., Russell, C.
Leveling Down in Computer Vision: Pareto Inefficiencies in Fair Deep Classifiers
IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pages: 10410-10421, June 2022 (conference)
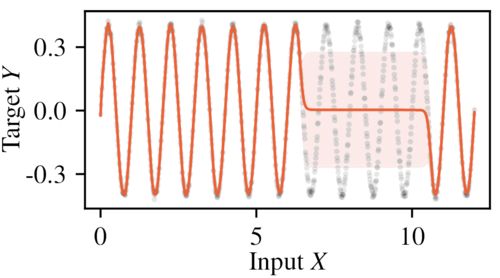
Seitzer, M., Tavakoli, A., Antic, D., Martius, G.
On the Pitfalls of Heteroscedastic Uncertainty Estimation with Probabilistic Neural Networks
International Conference on Learning Representations (ICLR 2022), Tenth International Conference on Learning Representations (ICLR 2022) , April 2022 (conference)
Fatemi, M., Tavakoli, A.
Orchestrated Value Mapping for Reinforcement Learning
International Conference on Learning Representations, April 2022 (conference)
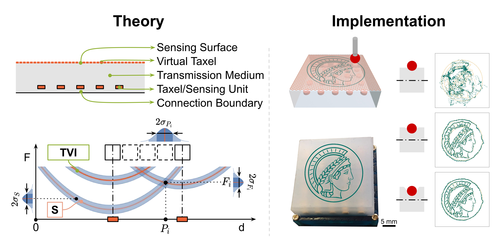
Sun, H., Martius, G.
Guiding the Design of Superresolution Tactile Skins with Taxel Value Isolines Theory
Science Robotics, 7(63):eabm0608, February 2022 (article)
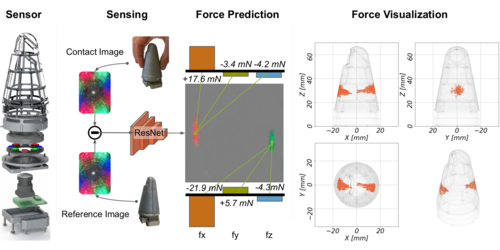
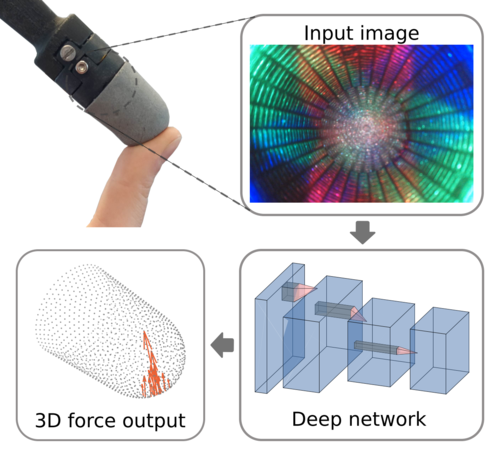
Sun, H., Kuchenbecker, K. J., Martius, G.
A Soft Thumb-Sized Vision-Based Sensor with Accurate All-Round Force Perception
Nature Machine Intelligence, 4(2):135-145, February 2022 (article)
Carnazza, F., Carollo, F., Zietlow, D., Andergassen, S., Martius, G., Lesanovsky, I.
Inferring Markovian quantum master equations of few-body observables in interacting spin chains
New Journal of Physics, 24, IOP Publishing, 2022 (article)
Sun, H.
Machine-Learning-Driven Haptic Sensor Design
University of Tuebingen, Library, 2022 (phdthesis)
Khajehabdollahi, S., Prosi, J., Giannakakis, E., Martius, G., Levina, A.
When to Be Critical? Performance and Evolvability in Different Regimes of Neural Ising Agents
Artificial Life, 28(4):458-478, 2022 (article)
Scholz, F., Gumbsch, C., Otte, S., Butz, M. V.
Inference of affordances and active motor control in simulated agents
Frontiers in Neurobiotics, 16, 2022 (article)
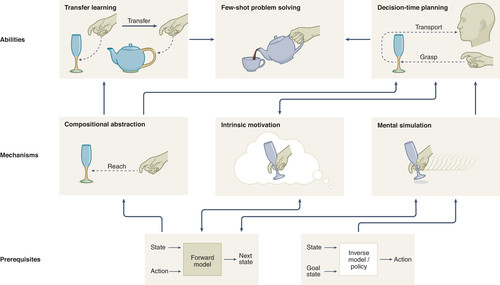
Eppe, M., Gumbsch, C., Kerzel, M., Nguyen, P. D. H., Butz, M. V., Wermter, S.
Intelligent problem-solving as integrated hierarchical reinforcement learning
Nature Machine Intelligence, 4(1):11-20, 2022 (article)
Werner, M., Junginger, A., Hennig, P., Martius, G.
Uncertainty in Equation Learning
In GECCO ’22: Proceedings of the Genetic and Evolutionary Computation Conference Companion (GECCO), pages: 2298-2305, ACM, Genetic and Evolutionary Computation Conference (GECCO 2022) , 2022 (inproceedings)
2021
Gürtler, N., Büchler, D., Martius, G.
Hierarchical Reinforcement Learning with Timed Subgoals
In Advances in Neural Information Processing Systems 34, 26, pages: 21732-21743, (Editors: M. Ranzato and A. Beygelzimer and Y. Dauphin and P. S. Liang and J. Wortman Vaughan), Curran Associates, Inc., Red Hook, NY, 35th Conference on Neural Information Processing Systems (NeurIPS 2021), December 2021 (inproceedings)